-->
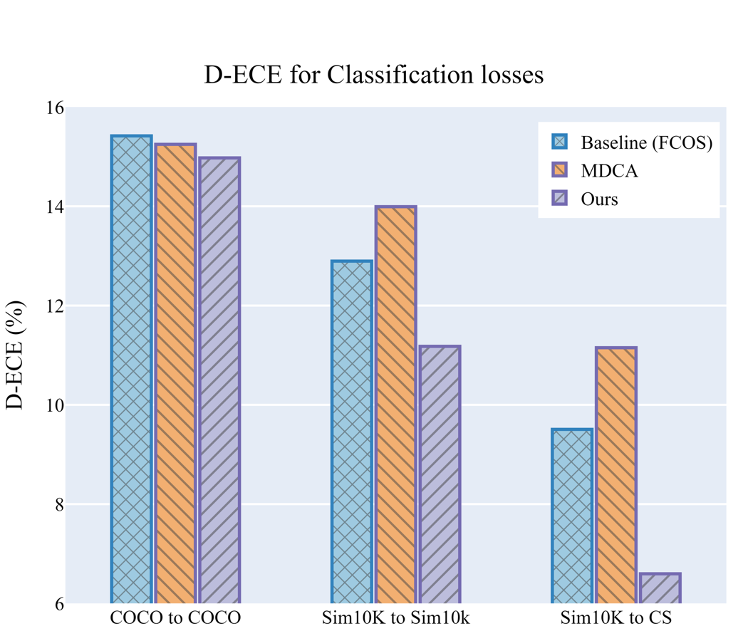
calibration methods for image classification are sub-optimal for object detection.
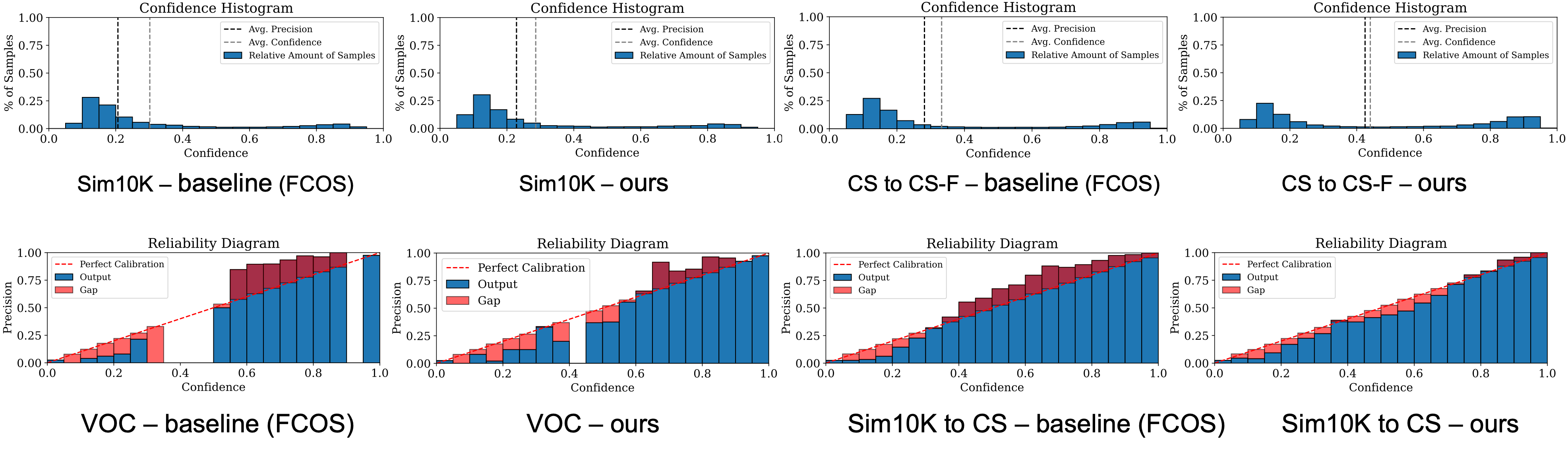
Reliability diagrams for baseline and our method.
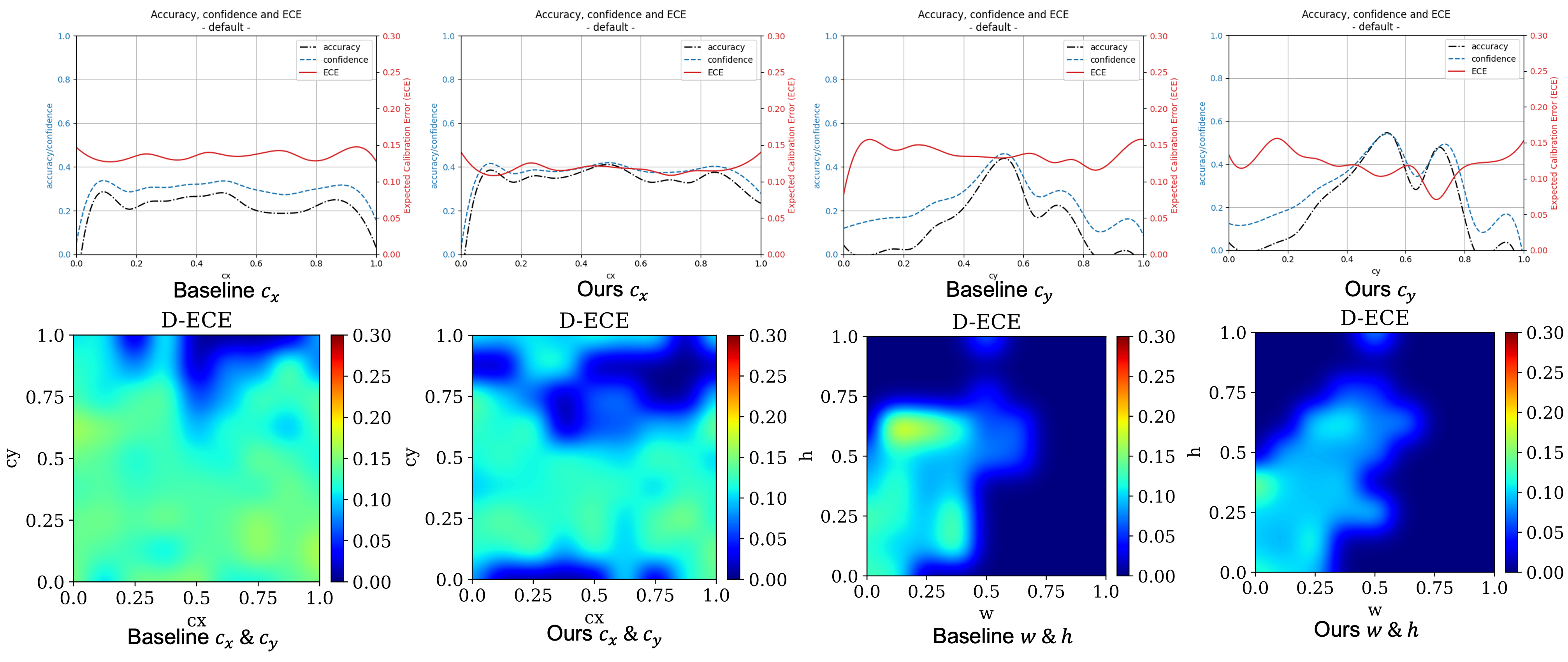
Calibration heatmap diagrams for baseline and our method.